NASA Micro-g NExT Challenge
Columbia Space Initiative, New York, NY
As co-lead for a student engineering team in the Fall of 2022, I led ideation, design, proposal, and early manufacturing efforts for an autonomous recue boat as a part of NASA’s Micro-G NeXT challenge.
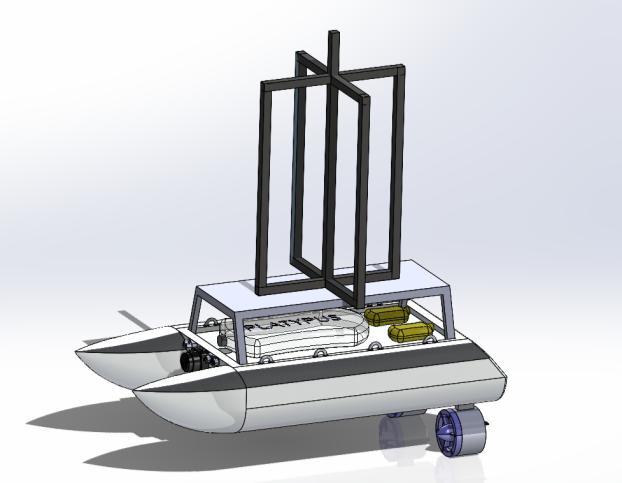
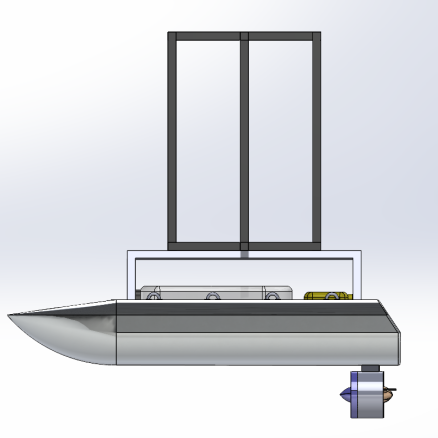
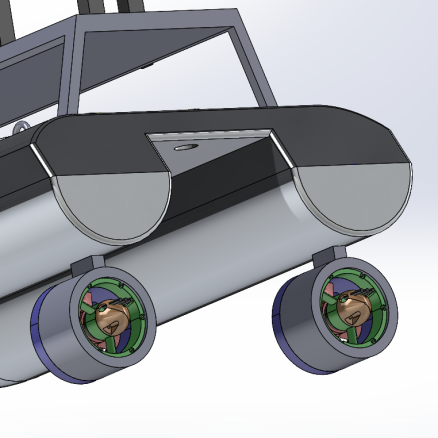
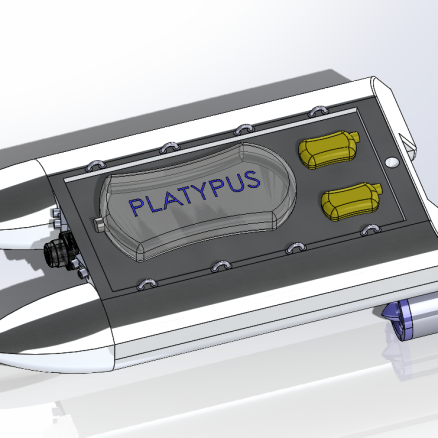
The proposed design aimed to deliver emergency supplies to astronauts in the case of an unexpected water landing. Our catamaran hull was designed with stability in mind, making use of a dual-pontoon structure to weather ocean waves. An early prototype of the hull was manufactured using a combination of PLA and SLS printing. Propulsion came in the form of two reversible motors on the rear of the boat, allowing for full 2D steering capability.
To locate the astronaut return capsule, the boat was designed to home in on a 121.65 MHz swept-tone emergency signal using a dual-loop Adcock antenna array. Comparison of phase angles for each of the loops allowed for calculation of the incoming signal’s angle of arrival, while a third omnidirectional component resolved the 180 degree ambiguity produced by such a system. Additional ultrasonic and LiDAR sensors were also included for obstacle detection and target identification. Autonomous direction finding and motor control were implemented on a Raspberry Pi microprocessor in Python.
My contributions centered primarily around hull design, CAD, and manufacturing, but as team lead, I also worked heavily on systems integration, and collaborated with each of our three sub-teams (mechanical, electrical, and software) to produce a cohesive design.
A detailed proposal of the design formulated by the 20-member team was submitted to NASA in October of 2022. The full text can be found below.