NASA Micro-g NExT Challenge
Columbia Space Initiative, New York, NY
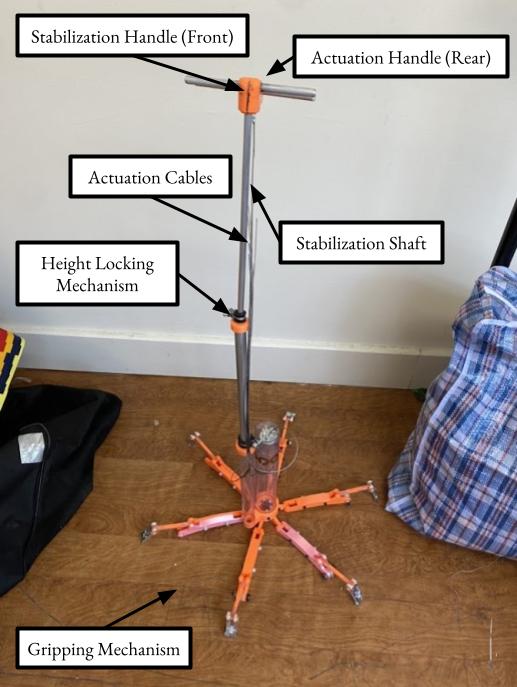
My freshman year, I worked in a small team of students to conceptualize, design, and fabricate a lunar gripping device. The design accounted for many of the challenges encountered by astronauts on the lunar surface, including lunar dust, limited mobility, and diversity in rock sizes and shapes.
The main body of the design consisted of six independently-actuated arms controlled by a central height-adjustable handle. Independent actuation allowed for the gripper to tighten around varying geometries with minimal effort from the astronaut user. The feet of the device were covered using gecko grippers—pads that take advantage of Van der Waals forces to grip without being sticky—to create a strong bond between the gripper and lunar samples. The design was also equipped with foot-mounted rollers to ease the gripping process and an ergonomic, easy-to-grip handle design.
The gripper was ultimately selected by NASA for testing in the Neutral Buoyancy Lab in Houston, TX in the Summer of 2022.