Robotic Exploration Laboratory
Carnegie Mellon University, Pittsburgh, PA
In this two-month project, my work centered on radio frequency signal processing for a simulated fleet of cube satellites that are designed to track wildlife using unintrusive tags.
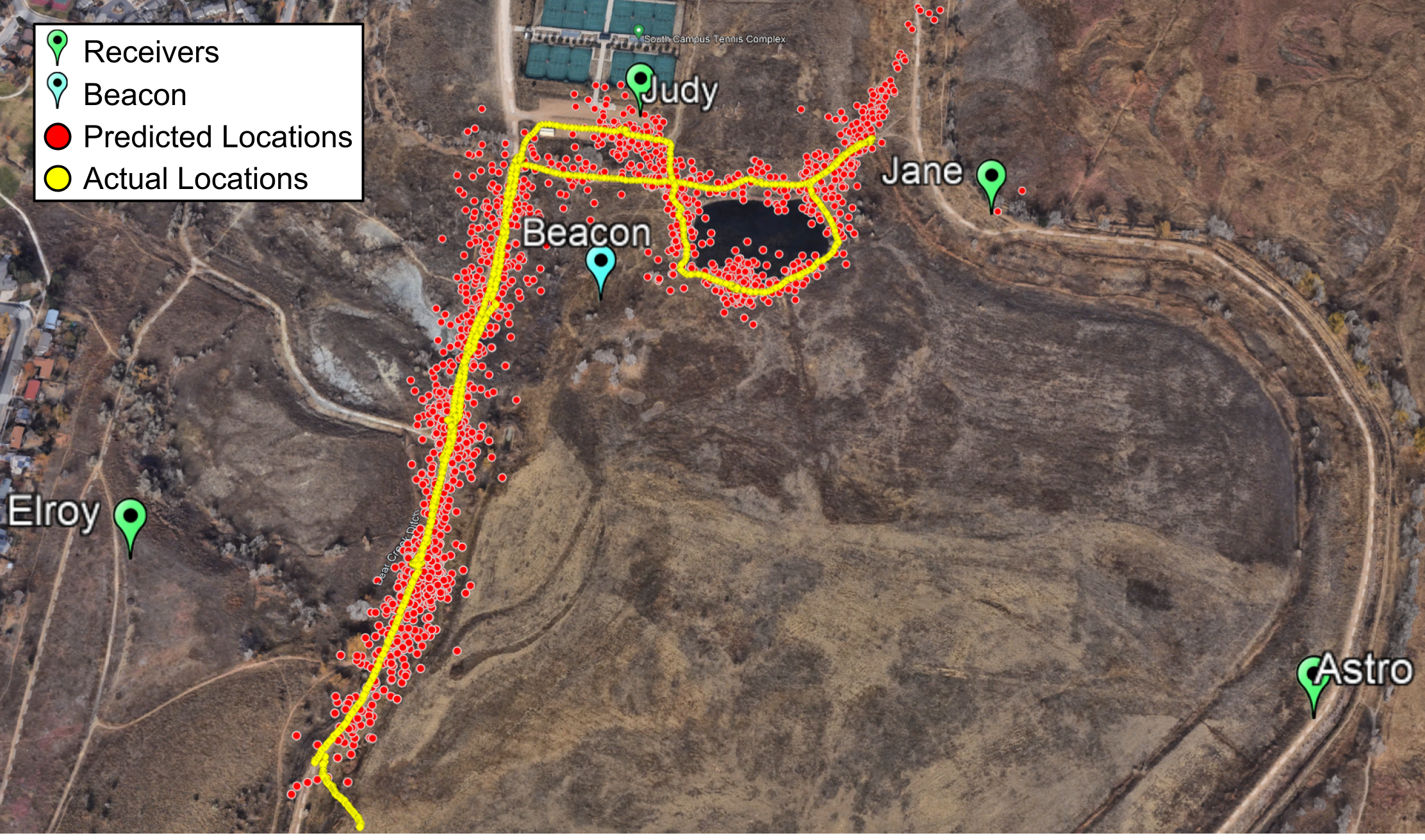
In a short experiment conducted at the beginning of the project, RF data were collected using a set of four stationary receivers (simulating the satellites) and a moving beacon (simulating an animal being tracked). Throughout the summer, I worked on converting the raw data collected by the receivers into predictions of the beacon location over time. This was done by optimizing a time-of-flight equation for each of the four receivers simultaneously, and involved correlating and cleaning billions of samples across a 40-minute period.
As a part of the processing, I also accounted for time offsets between the receivers and cleaned up correlation results to determine more accurate signal arrival times. High-level precision was achieved, with typical residual values of around 22m in a kilometer squared testing site. Data processing methods were developed in MATLAB and are available on GitHub here.
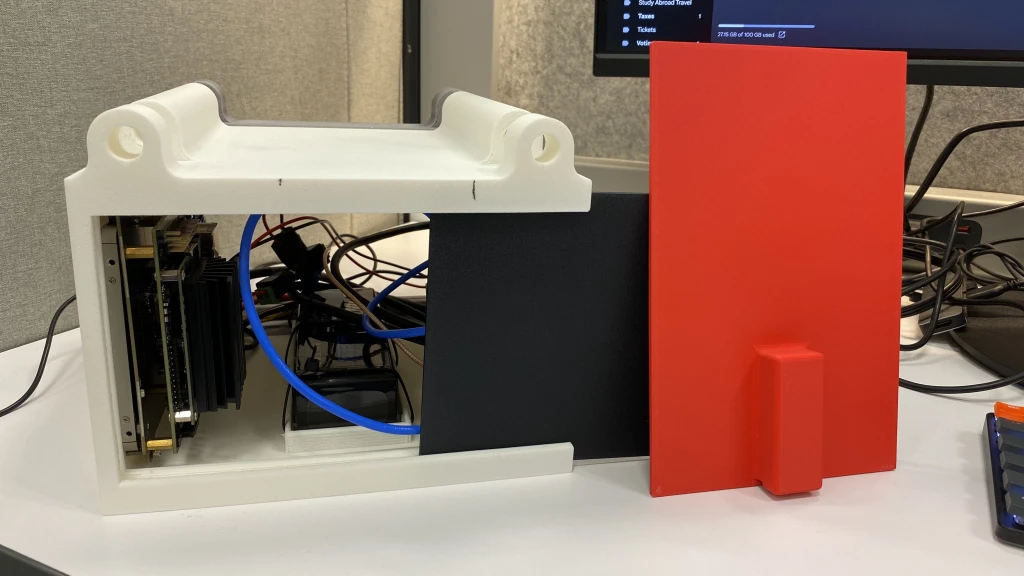
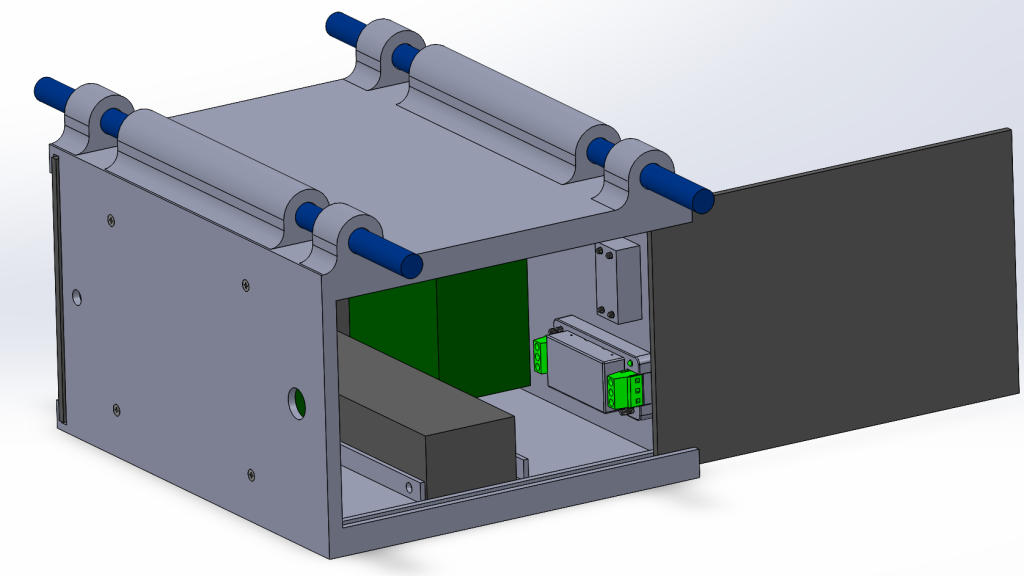
Finally, I also worked to design and print a lightweight, water resistant radio receiver box for mounting on a drone. This will allow future developments to provide altitude determination accuracy in the experiment. The full CAD design is also available on GitHub here.
My full paper can be found below. This work was later integrated into a publication in IEEE Aerospace.